Hands
...
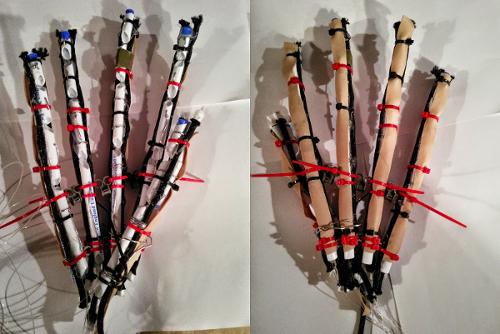
Fingers
The interphalangeal articulations of the hand are represented as hinge joints connecting the phalanges of each digit. The interphalangeal joints connect the proximal, intermediate and distal phalanges and allow for 90 degrees of flexion and extension. Each interphalangeal joint must prevent hyperextension of the phalanges.

- Symetry 80, 89, 95, 89, 80 for the length of each metacarple.
- Fibonacci sequence 1, 1, 2, 3, 5... allows hand to make a fist.
The metacarpophalangeal articulations of the joints connecting each proximal phalanx to the metacarpal should permit movement in two planes, allowing flexion, extension, adduction, abduction, and circumduction.
| Joint type | Range of flexion/extension | Range of adduction/abduction |
| Interphalangeal | 90 degrees | None |
| Metacarpophalangeal | 90 degrees | 30 degrees |
 Dimensions of phalangeal digits
Dimensions of phalangeal digits
| Index finger | Middle finger | Ring finger | Pinky | Thumb | |
| Distal phalanx | |||||
| Intermediate phalanx | |||||
| Proximal phalanx | |||||
| Metacarpal | |||||
| Carpal |
Wrist
The wrist must permit movement in two planes, allowing flexion, extension, adduction, abduction, and circumduction.